
Oi_blog
RoboCup2023Bordeauxに出場したロボット紹介します
2023/07/19 河野響
概要
このロボットは過去2年間ちょっと大会に参加してきて機体設計として自分なりにこだわったところもあります。もちろん失敗したこともあります。是非最後まで見てください。
メンテンナンス性を良くするためにだいぶシンプルな設計になっていると思います。ロボットを分解しなくても基板にアクセス出来てメンテナンスできます。また、六角のドライバー1本で最後まで分解できるようにしました。良いところは参考にしてみてください。
オフェンスロボットを分解していますが、ディフェンスロボットも基本的には同じです。
※世界大会のコートの白線が削れてロボットに白い粉が付いて汚いのは許してください
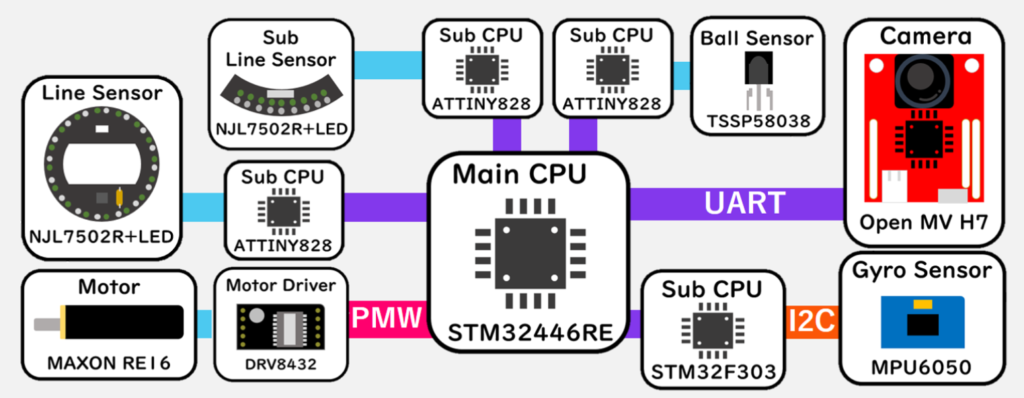
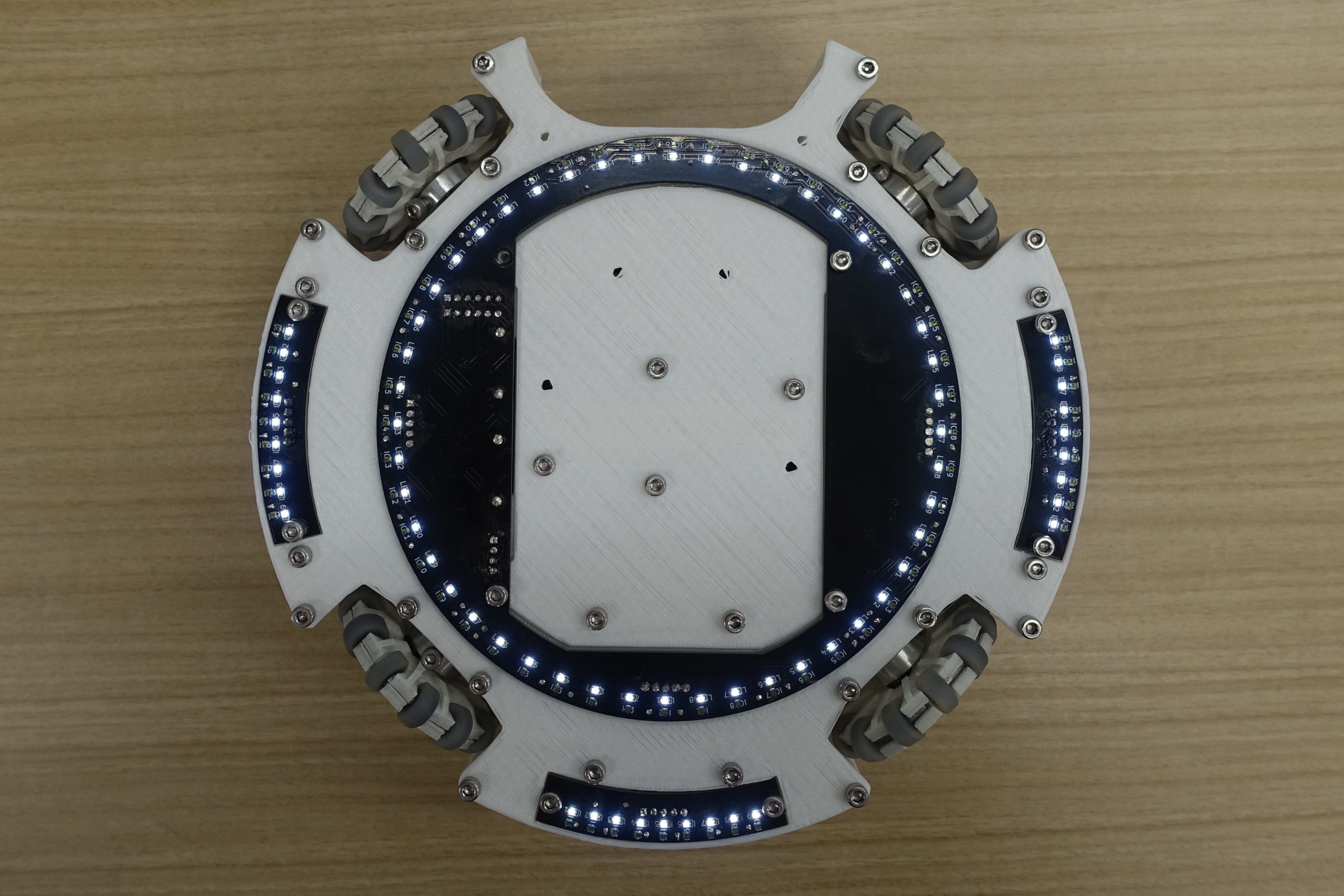
概要図
ポスターにも載せた、ロボットのシステム概要図です。
上段
はじめに、ロボットを上下二つに分解します。僕たちのチームはこの形でいつも運んでいます。
ねじ4本とコネクタ1つを外すと上下に分解できます。

OpenMVの全方位カメラを抜くと下の写真の様になります。IRセンサー基板にある4本のねじが上下に分解するときに外すネジです。

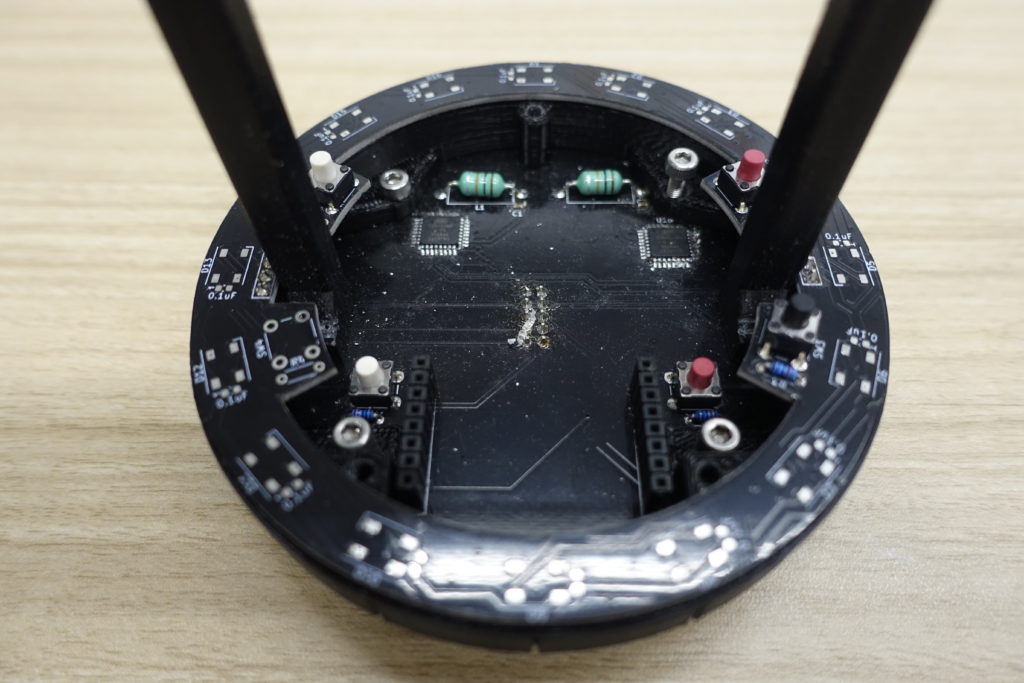
IRセンサー基板
IRセンサー基板をさらに分解してみます。
IRセンサー基板のセットにはハンドル、スイッチ基板(NeoPixcelを付けるはずだった)、IRセンサー基板、IRセンサーカバーで構成されています。
このセットはねじとピンヘッダで挟むようにしていい感じに固定されてます。
IRセンサー基板の裏側に10ピンのコネクタを付けてます全方位カメラ、IRセンサー、スイッチをまとめて1本で下に配線してます。


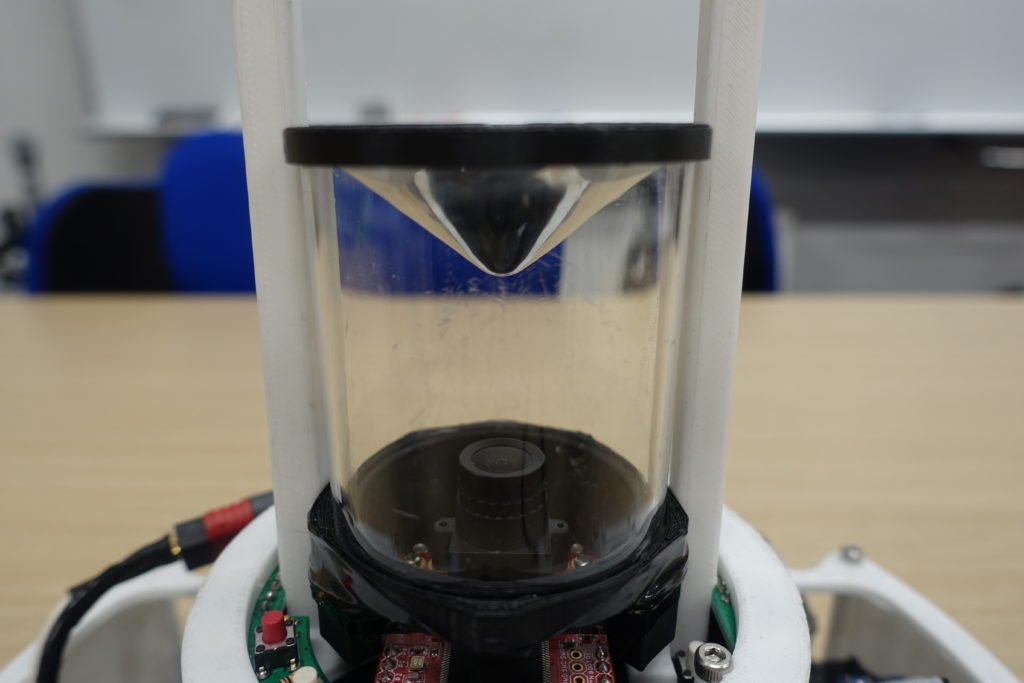
全方位カメラ
全方位カメラはOpenMV、塩ビミラーシート、3Dプリンターパーツ、アクリルパイプで作りました。
ミラーシートを3Dプリンターで作った型にヒートプレスをして成形しています。

スポンサー様
JLPCB様には、ロボットのパーツを提供して頂きました。今まで自分たちで3Dプリンターで印刷した物と違い耐久性も高く世界大会で良い活躍することができました。とても感謝しています。
クーポンも出てるので是非、発注してみてください
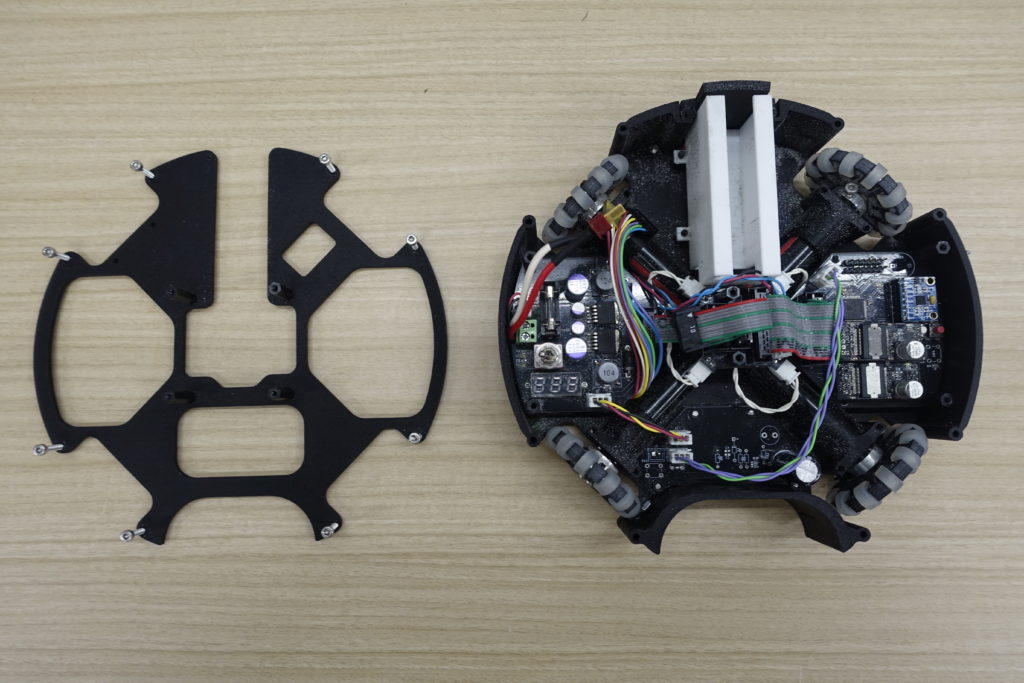
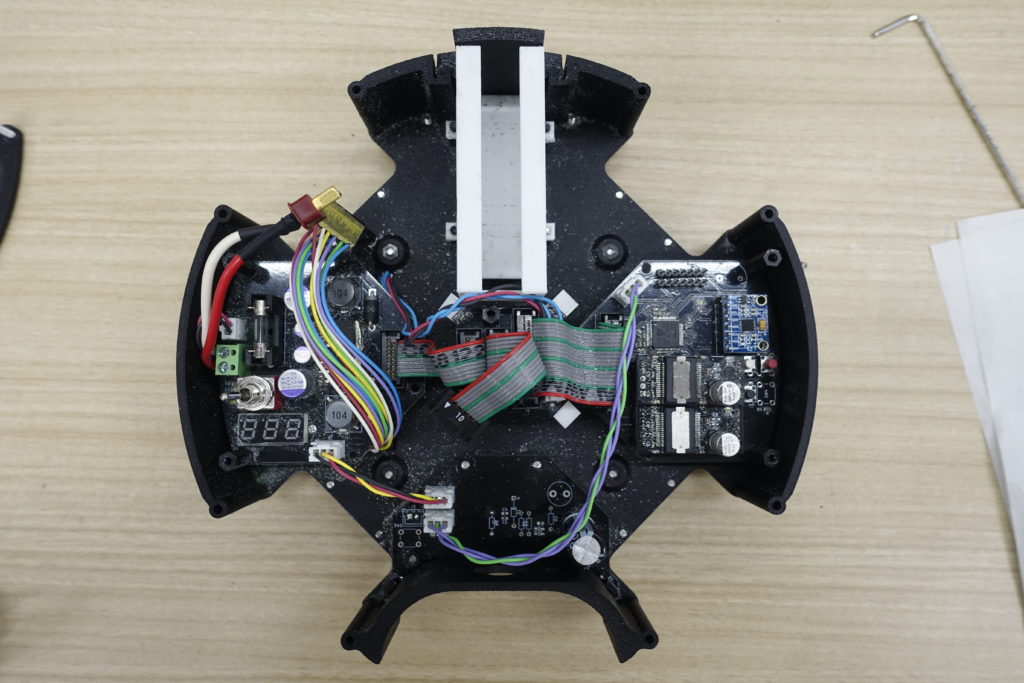
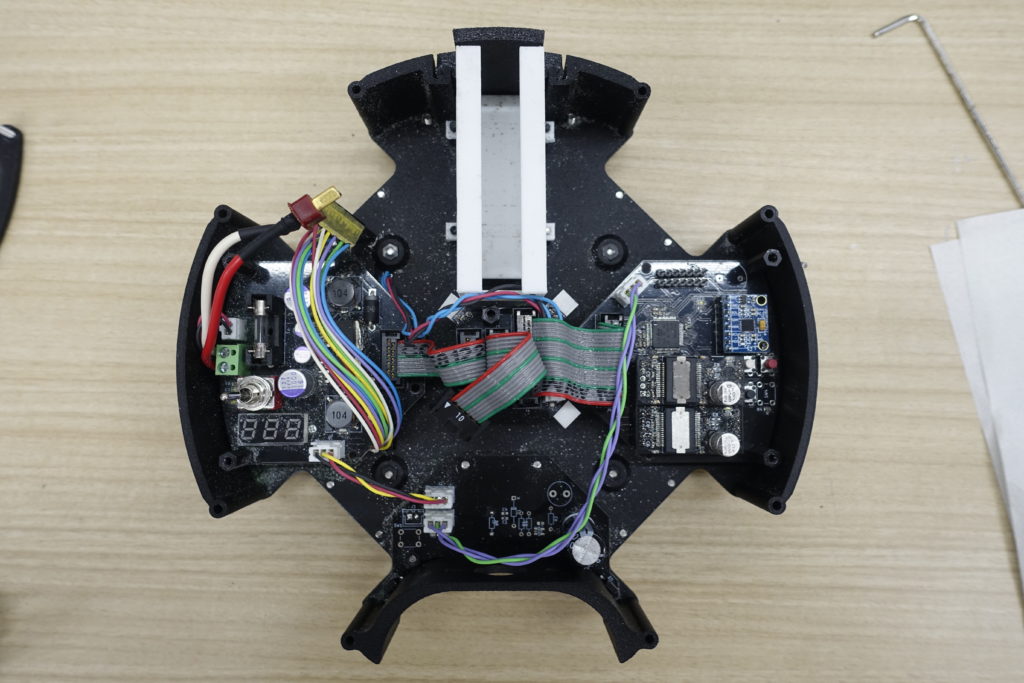
下段
次に、下段です。何かトラブルがあった時でも左の状態ですべての基板をいじることができるようになってます。いっきに入れ替えたりするときは右の写真のように天板を外します。めったに外さないです。
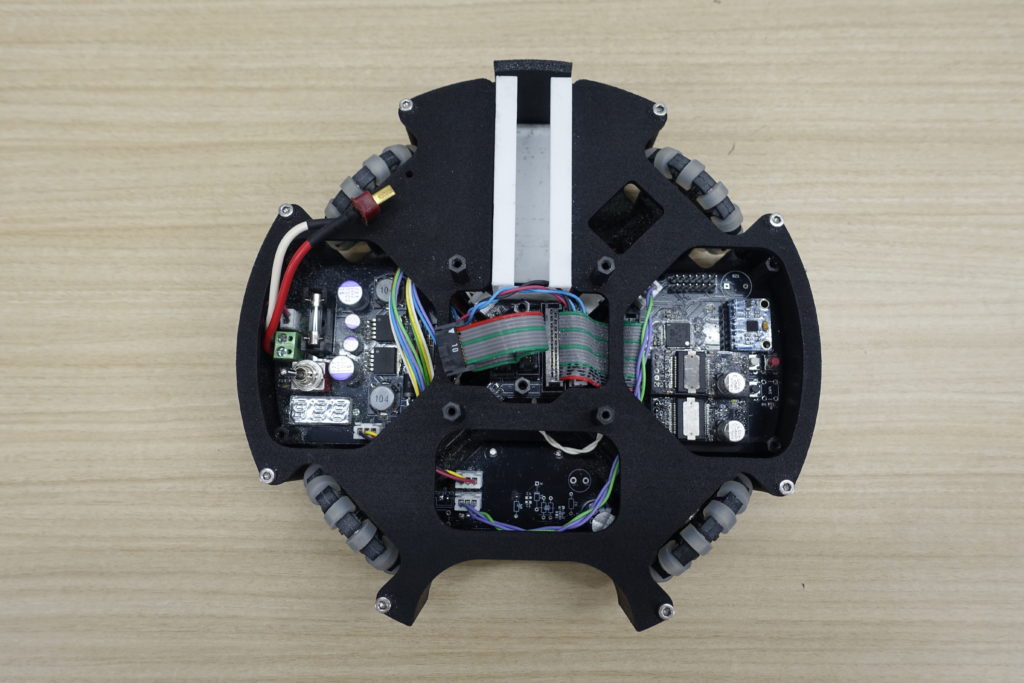
下段にいろいろ詰まってるのでどんどん紹介していきます。
モーター周り
モーター、モーターマウント、オムニホイールのセットをロボットの裏側にあるねじ2本とコネクタ1つを抜くことでモーター周りのセットで外すことができます。
モーター周りだけで写真撮り忘れたので下の写真だけで許してください。モーターマウントの裏については後で説明します。

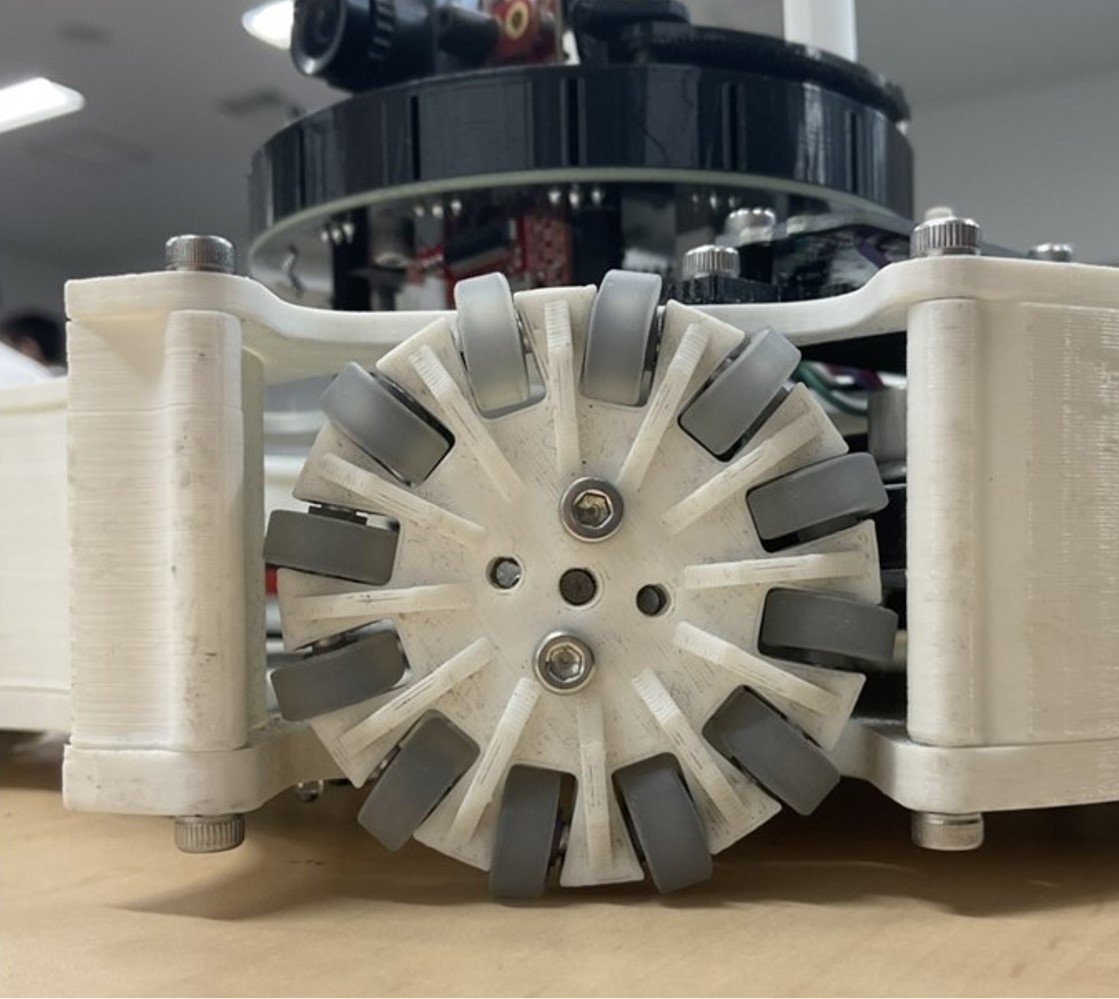
オムニホイール
※オムニホイール色違うだけで形同じです。
自作の3Dプリンターで作ったオムニホイールをずっと使ってます。モーターハブだけ売ってる金属製のものを使ってます。3Dプリンター製でも耐久力を上げるために表面に筋を作って折れないようにしてます。一応今まで一度も壊れたぬことはないです。
サイドホイールはシリコンチューブを切って中に短いスペーサーを入れて針金を通して使ってます。


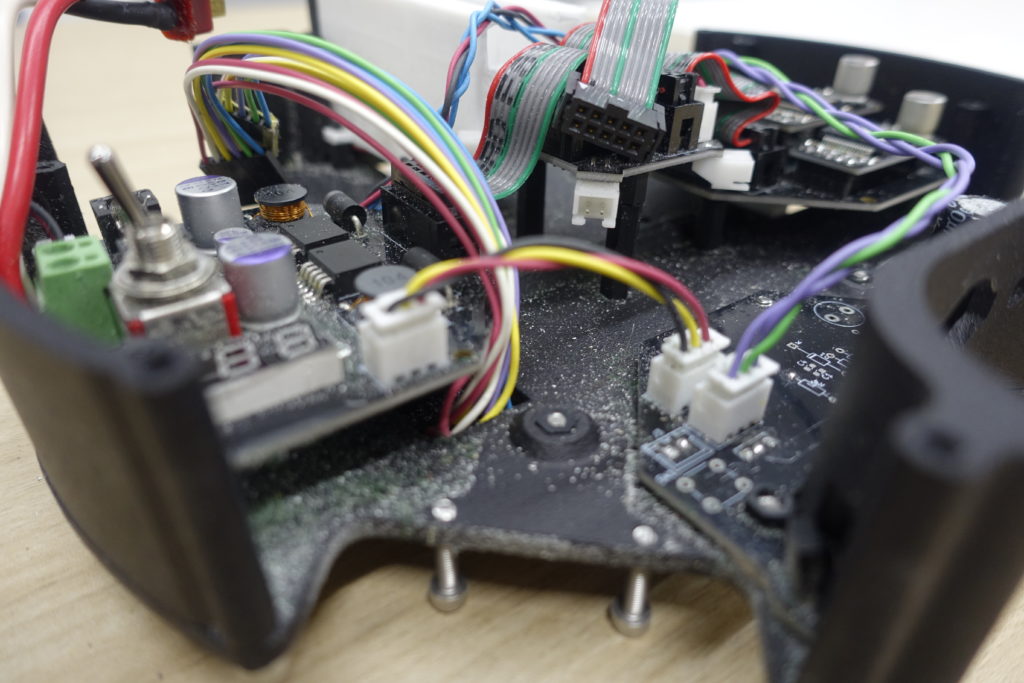
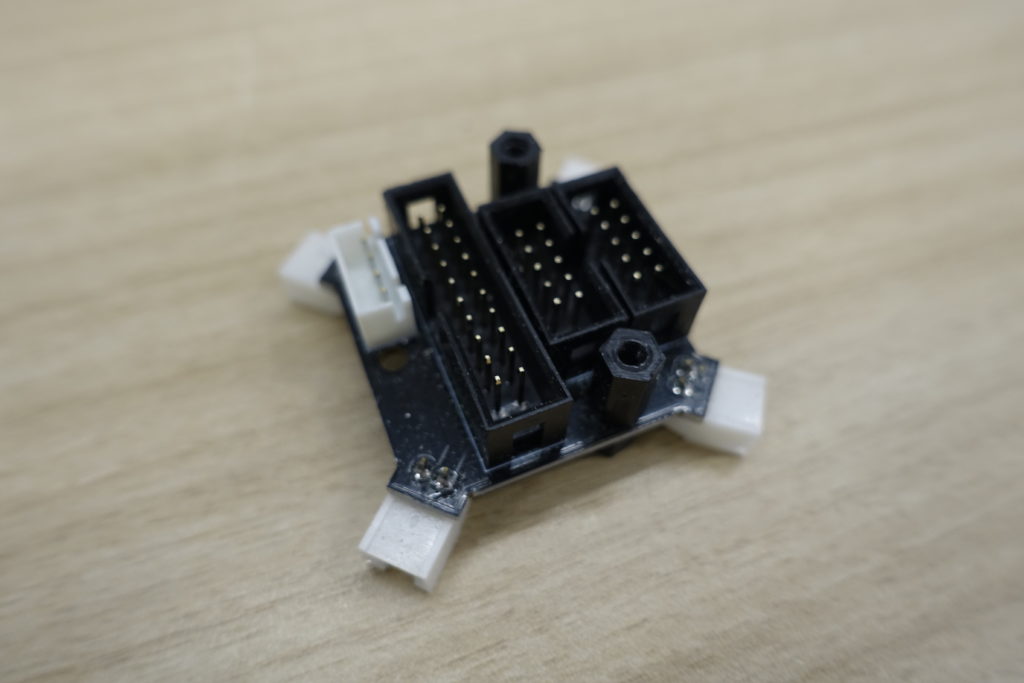
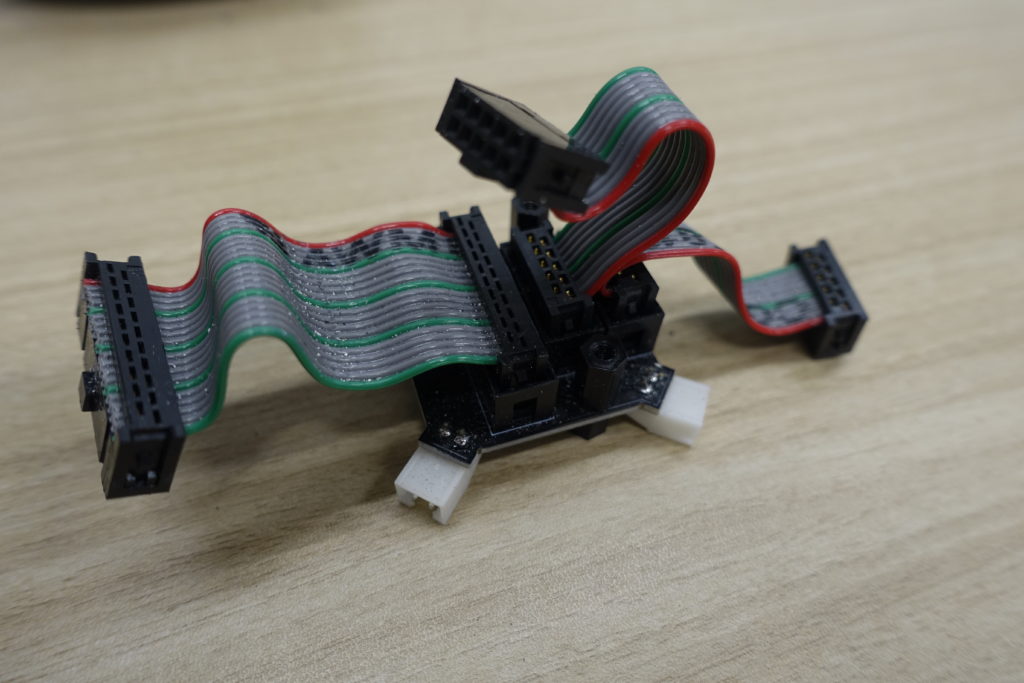
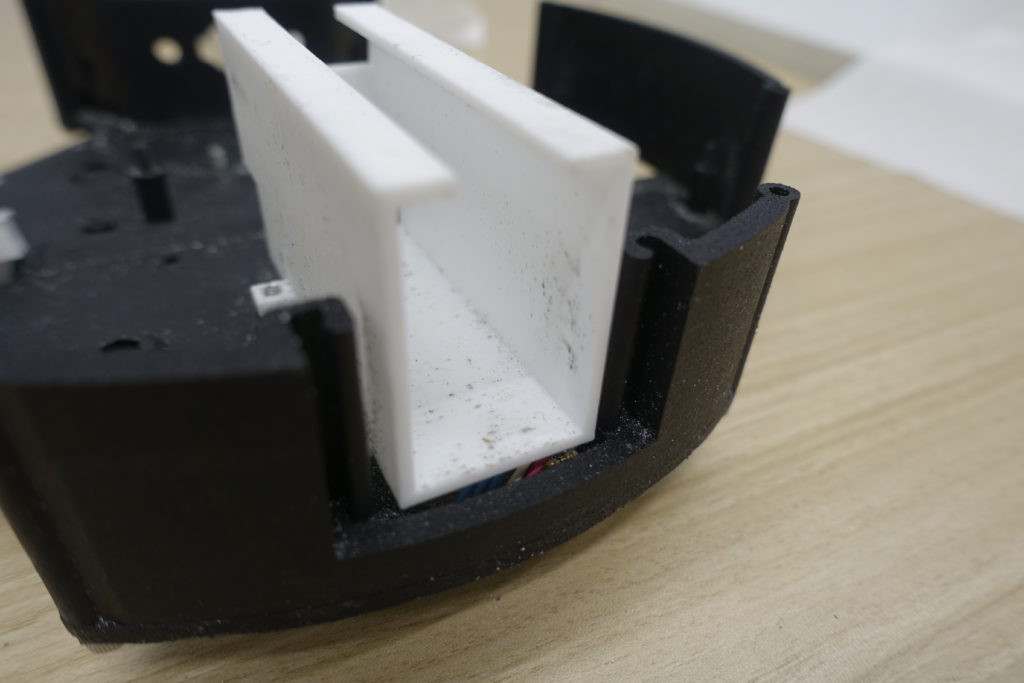
中央基板
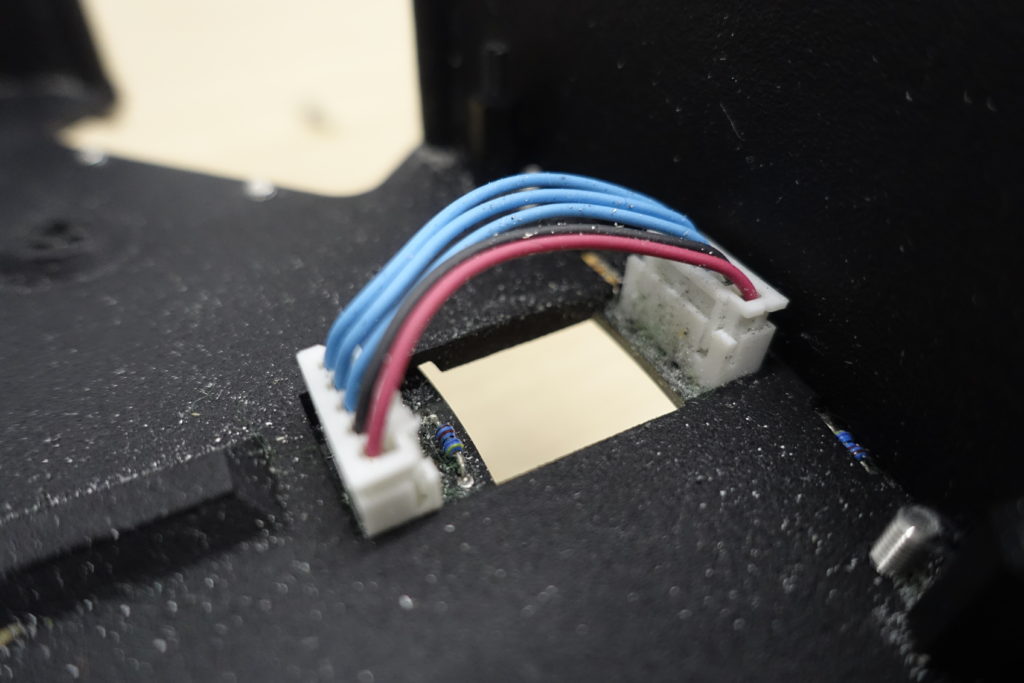
中央基板は上段、メイン基板、電源基板、モーターからの配線を途中で経由させることで配線の数と長さを減らすことができています。1年目の時に配線が多くてメンテナンス性が悪すぎたので配線をできるだけ減らせるようにこの形にしました。中央基板にある白いXHコネクタはラインセンサーにつながっている線です。

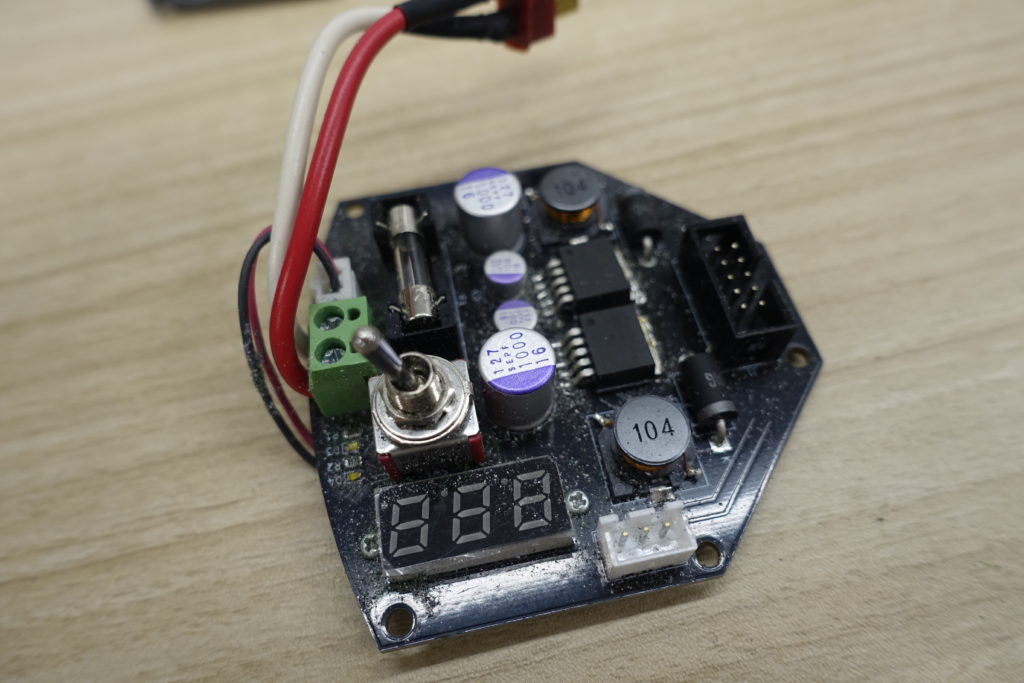
電源基板
左側の基板が電源基板です。バッテリーから来た12Vを5Vと3.3Vに降圧して他の基板に送っています。中央基板には10ピンのフラットケーブルでつながってます。
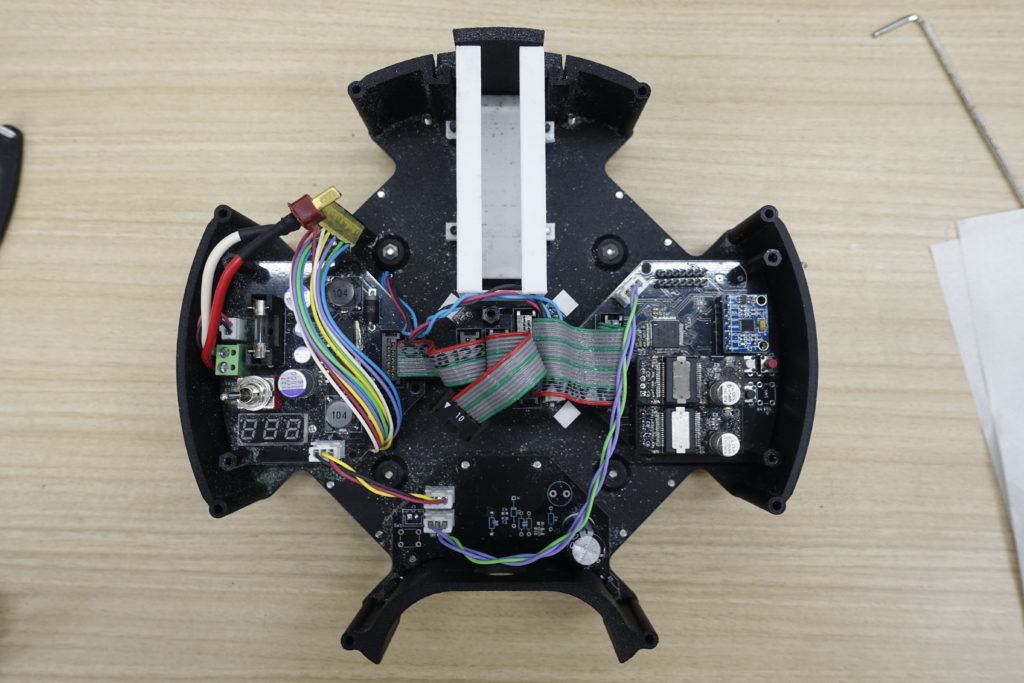
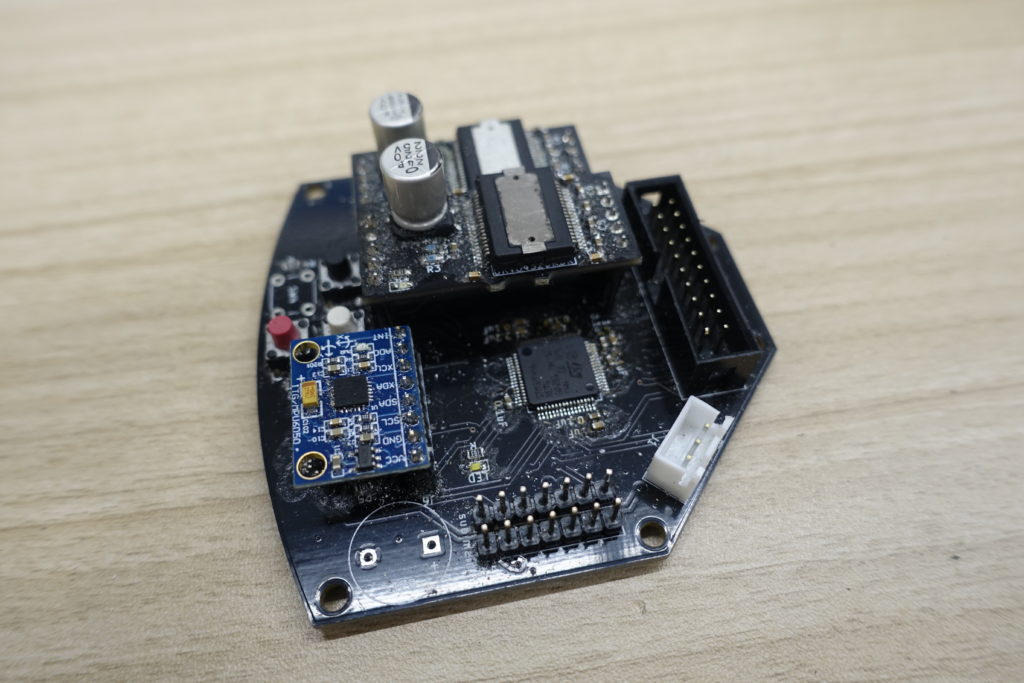
メイン基板
右側の基板がメイン基板です。マイコン、ジャイロセンサー、モータードライバーが載ってます。中央基板には20ピンのフラットケーブルでつながってます。
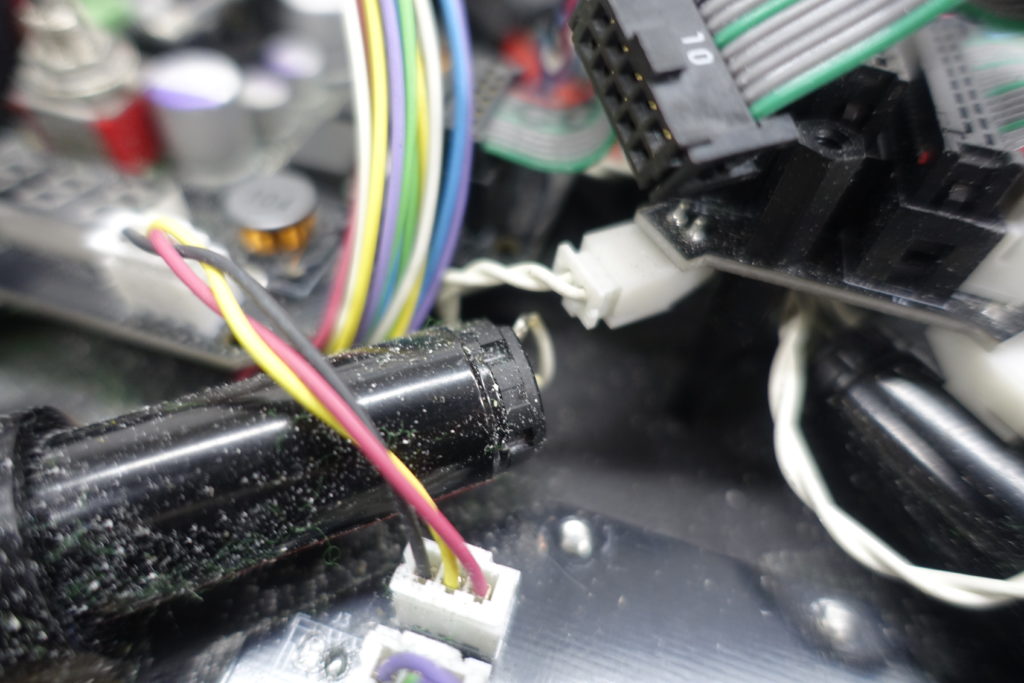
キッカー基板
ロボット前方の基板です。名前の通りキッカーを載せるはずだった基板です。自作で昇圧回路を組んでやろうとしたらできずに、ボールをホールドできているか確認するためだけに使ってました。IRセンサーを2つ付けてボールをホールドしているか判断して、ホールドしているときだけ全方位カメラの情報をプログラムに使ってます。キッカー基板の配線だけ直接メイン基板と電源基板に配線してます。

バッテリーカバー
バッテリー交換時間をできるだけ短くしようとして作ったバッテリーカバーです。TPUフィラメントを使って3Dプリンターで印刷しました。できるだけハーフタイムをソフト関係に使いたくてこのカバーにしました。日本では車検が怖かったんですけど、世界大会だとテープで貼り付けただけのチームがあったりしたのでこれでも大丈夫だと思います。
ラインセンサー
ラインセンサーは大きいエンジェルセンサーとさらに外側に3つのサブラインセンサーを付けてます。外側のセンサーが反応したら反応した方向のベクトルを0にしてエンジェルセンサーが反応したら反対方向に移動する感じです。
※詳しいプログラムとかはプレゼンシートとかを見てください。わかりやすいように下板の色が白の時の写真使ってます。

サブラインセンサーの配線をエンジェルラインセンサーにつなげてます。ラインセンサーの配線を一つにまとめてエンジェルセンサーから中央基板に繋げてます。

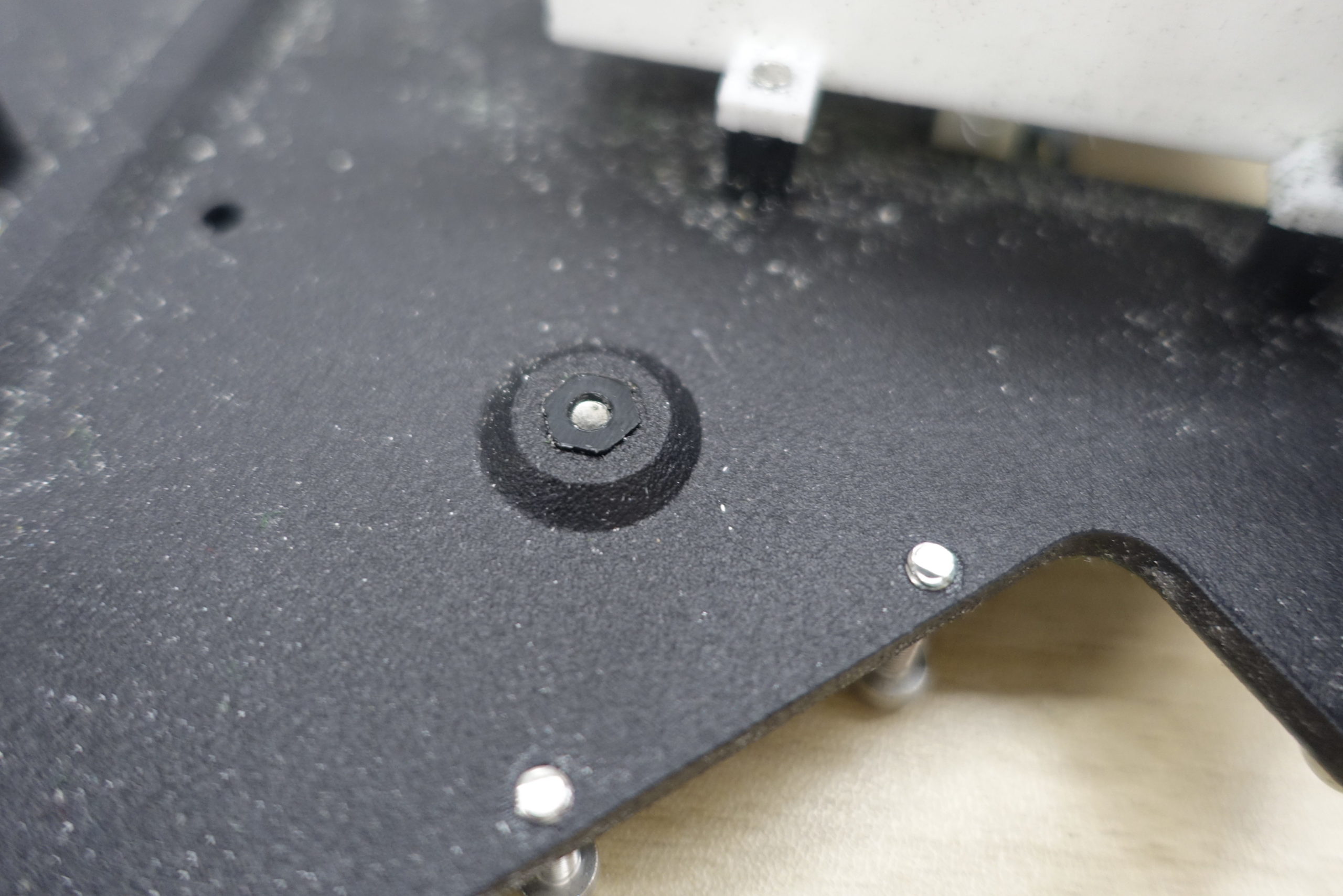
ラインセンサーはすべてロボットの裏側からねじで固定しているので簡単に外すことができます。実際に世界大会でラインセンサーを交換することがあってメンテナンス性高くして良かったと感じました。
下からねじを止める時3Dプリンター製でねじ穴が削れて抜けやすくなるのでナットで止まるようにしています。ナットが上からも止まるようにモータマウントでも抑えて止めてます。

まとめ
ざっと紹介しました。個人的にはシンプルにメンテナンス性が高いロボットを目標にして作成しました。少しは達成できたんじゃないかなと思ってます。
世界大会に行きたい人はロボットの中にゴミだったり粉が入らないようにカバーを付けた方がいいですよ。いや付けましょう。
三年間ロボカップをやってドリブラ―とキッカーを載せたロボットが作れなかったのが少しの後悔です。キッカーとドリブラーが無くても一応世界1位は取れます。頑張ってください!



