NEWS
電子技術研究部のニュースをご紹介します
世界大会経験チームが語る ロボカップのためのプログラムの方法とは!? 入門編【初心者向け】
みなさんこんにちは、Oi DENGIKEN です!
この記事ではロボカップジュニアサッカーを始めるためにプログラムでは何をしたらいいのかについて書いていきたいと思います。
まずは細かい制御方法ではなく、ロボットがどのような処理で動いているかを、大まかに説明していきます。
ロボットを動かすための主な処理
ロボットの動作を支えるプログラムは、以下の 5 つの要素に大きく分けることができます。
| 駆動・姿勢制御(タイヤ・ジャイロ) |
| 赤外線ボール検出(IR センサ) |
| 白線検出(ラインセンサ) |
| ゴール認識(カメラ) |
| メイン処理(オフェンス・ディフェンス) |
今回はこの中から「駆動・姿勢制御」「赤外線ボール検出」の 2 つについて紹介します。
駆動・姿勢制御について
ロボカップサッカーでは、ボールを追って素早く・自在に移動する必要があるため、360 度すべての方向に滑らかに動ける機動性が求められます。
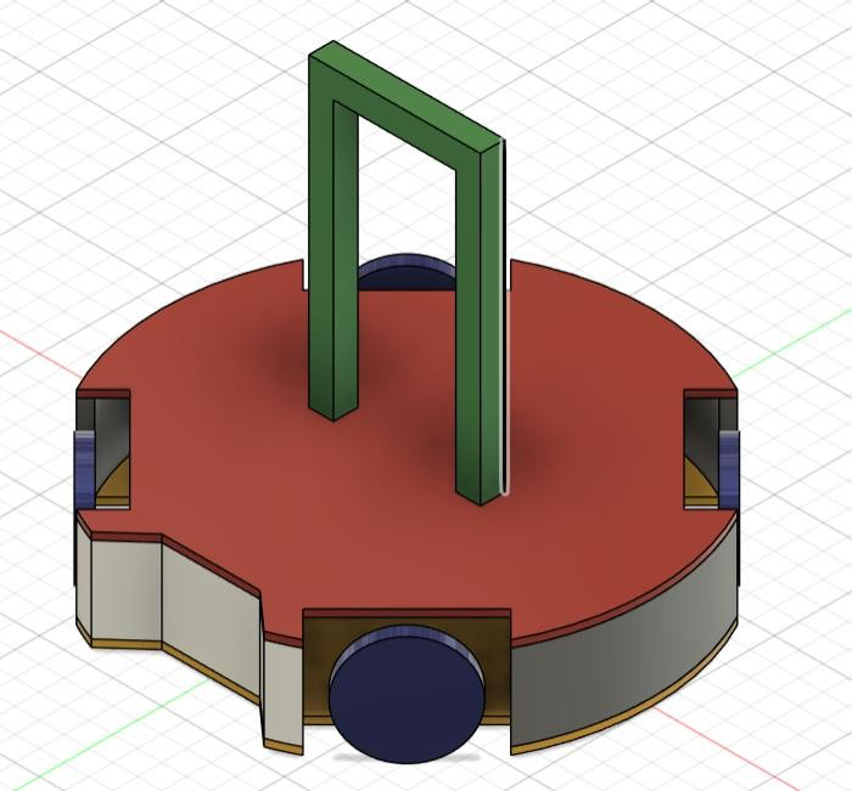
そこで私たちのチームでは、四輪オムニホイール方式のロボットを採用しています。
オムニホイールとは、車輪の周囲に複数のローラーが取り付けられており、それらが車軸と直交する方向に自由に回転する構造になっています。この構造により、ロボットは前後・左右・斜め方向への移動や、その場での回転といった全方向への移動が可能となります。
また、各ホイールを駆動するモーターの回転速度を個別に制御することで、360 度あらゆる方向にスムーズな移動が実現できます。
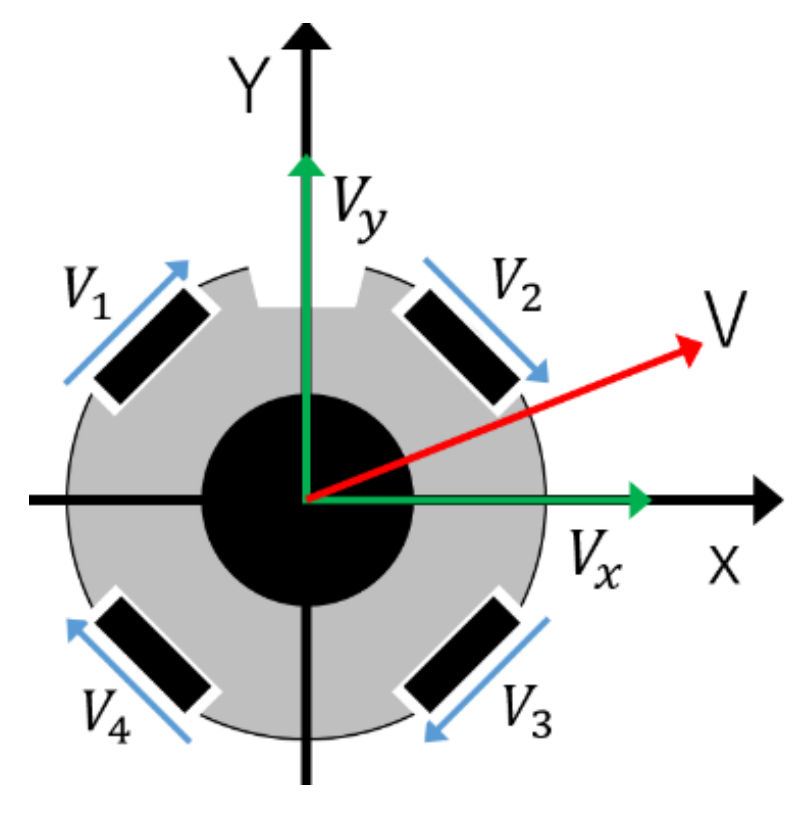
①移動方向のベクトルを x,y 成分に分解する。
②あらかじめ定義した行列式に x,y 成分を代入すると各モーターのパワーの比率が求まる。角度とパワーを指定することで任意の方向に移動できる。
さらに、ジャイロセンサーを用いることで、ロボットが現在どの方向を向いているのかを把握することができ、その情報をもとに PID 制御を行うことで安定して機体を正面に向かせることや指定の方向に向かせることが可能になります。
赤外線ボール検出について
ボールを追うためにはボールの位置を正確に知る必要があります。そのため、IR センサーを使用することで、位置を見つけます。私たちのチームは IR センサーを円状に16 個配置し、それぞれのセンサーから受け取った赤外線の強さをもとにボールの位置を割り出しています。
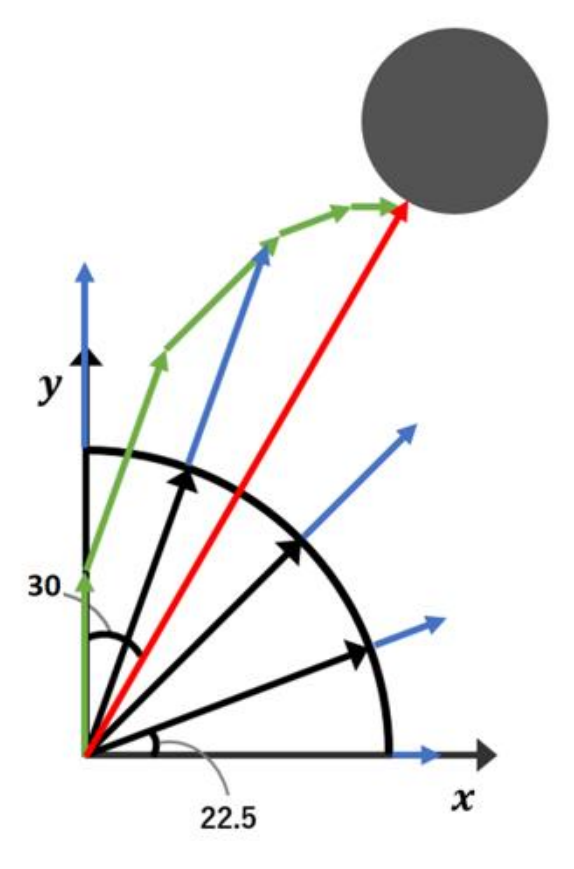
①赤外線センサが読み取るボールのパルスの強度 (青)を三角関数で x,y 成分に分解する。
②すべてのセンサーの x,y 成分をそれぞれ合計する。(緑)
③求めた座標がボールの位置を表すベクトルになる。(赤)
最後に
いかがでしたか。もし少しでも興味がわいた方はロボカップジュニアの公式サイト、実際の大会の様子もご覧ください!
ぜひみなさんもロボカップジュニアサッカーに挑戦してみてくださいね!